A study published in Knowledge-Based Systems, led by Prof. Zhao Hui from the Xi’an Institute of Optics and Precision Mechanics (XIOPM) of the Chinese Academy of Sciences, introduced an innovative long-term visual tracker based on contextual constraints and aberration suppression. This tracker has good discriminative ability in a high-density and high-dynamic clutter environment, marking a significant breakthrough in the field of Visual tracking.
Visual tracking is a critical research area within computer vision, with applications in human-computer interaction, intelligent video surveillance and other fields. Traditional tracking methods, such as those based on Discriminative Correlation Filters (DCF), mitigate model drift by incorporating temporal and spatial regularization into the objective function and employing auxiliary strategies. However, these approaches often fail when subjected to simultaneous internal (e.g., appearance changes) and external (e.g., occlusions, clutter) disturbances.
In this study, researchers developed long-term object-tracking algorithm based on context constraint and aberration suppression (CCAS) based on DCF, which can effectively handle scenarios in which both internal interferences and external interferences appear simultaneously.
Firstly, the team restrain potential aberrances by constraining the alteration rate of the response map, thereby suppressing impermanent appearance variations
Moreover, the surroundings of the tracked target are integrated directly into the DCF to further improve filter discriminability, expanding the search regions for more robust tracking. In addition, we demonstrate that the proposed CF model can be efficiently optimized using Alternating Direction Method of Multipliers (ADMM), ensuring that computational efficiency is maintained throughout.
Furthermore, researchers address model degradation by training another CF as a local tracker, which maintains a long-term memory of the target appearance. Finally, the coordination mechanism based on historical responses and feedback to facilitate efficient interaction between them.
"This study fully explores the model drift when internal and external interference appear simultaneously, and is expected to provide strong support for practical applications such as remote sensing satellite monitoring, autonomous navigation and autonomous driving" Professor Zhao Hui said.
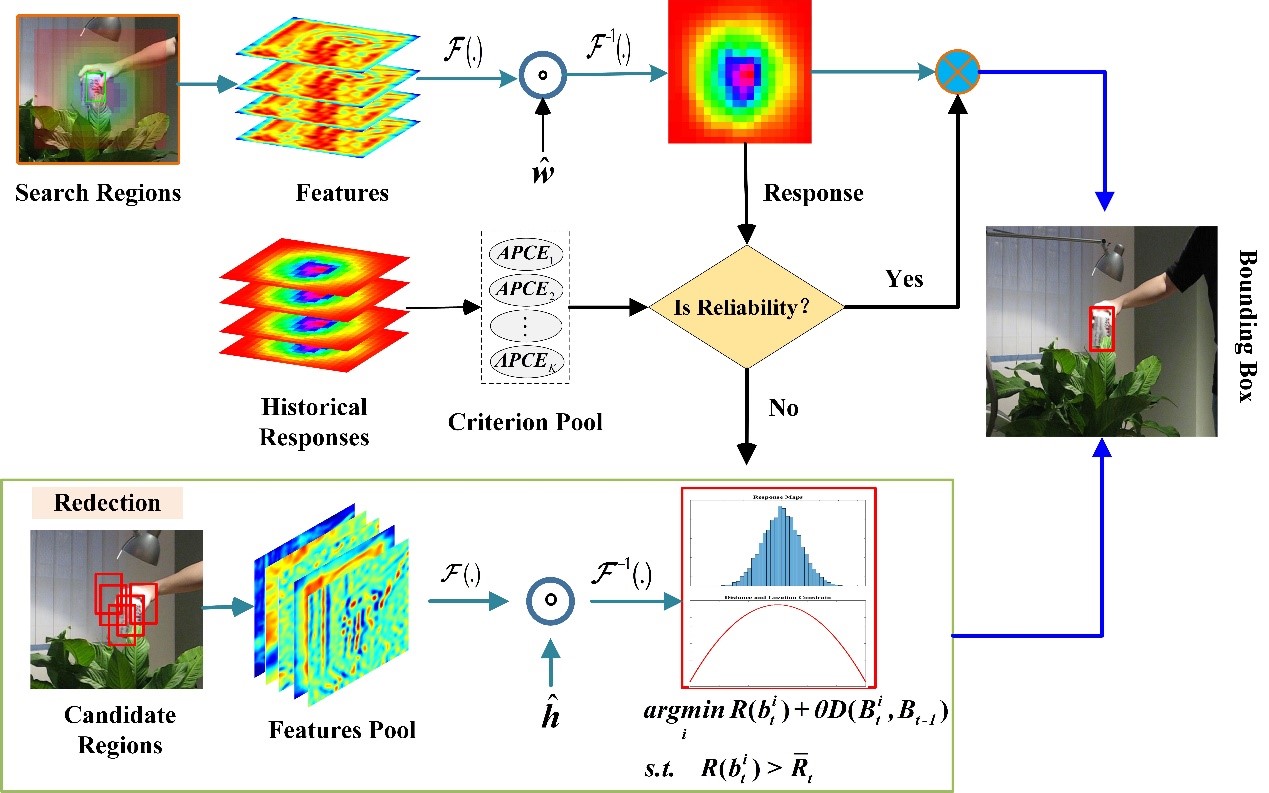
Fig. Framework of the CCAS, mainly composed CF, re-detected, and coordination mechanism. (Image by XIOPM)
Download: