Light Detection And Ranging (LiDAR) has been well known by the public as it offers high ranging accuracy, and shows promising prospects in autonomous vehicles and various field. Traditional frequency modulated continuous wave (FMCW) LIDAR ranging is based on heterodyne detection, calculating unknown distance by extracting the frequency of the interference signal. However, such technique suffers from frequency modulation (FM) nonlinearity, which leads to inaccurate ranging results.
As shown in Fig.1, due to the nonlinear relationship between the laser wavelength and injection current, the spectrum of the beat signal is broadened although the laser emits a triangle signal.
To solve the problem, a research team led by Prof. ZHANG Wenfu from Xi’an Institute of Optics and Precision Mechanics (XIOPM) of Chinese Academy of Sciences (CAS) proposed a new approach that samples the ranging signals at equal frequency intervals using microresonator soliton comb. The results were published in Optics Letters.
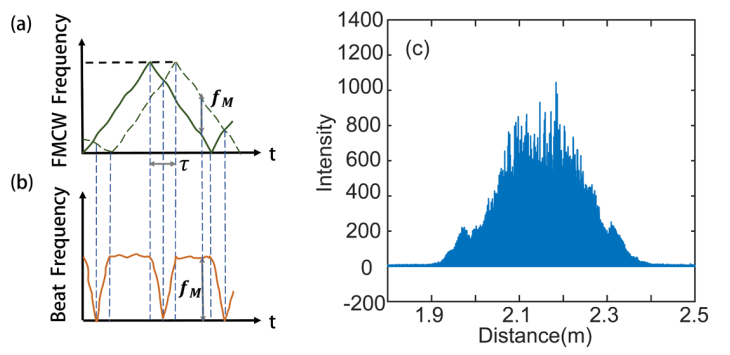 Fig. 1. Influence of FM nonlinearity on ranging results.
Fig. 1. Influence of FM nonlinearity on ranging results.
In the new system, accurate beat frequency is not required so that the data processing step is significantly simplified. Instead, the unknown distance is given by the linear relationship between the measured frequency interval and the corresponding phase of the ranging signal. Furthermore, thanks to the stable frequency characteristics of the soliton comb ensure accurate sampling, the system is almost impervious to external interference. Thirdly, the optical path of the system is almost unaffected by ambient temperature and humidity since the long optical fiber is not been used.
The experiment shows the ranging error is less than 20μm at a measuring distance of 2m, the promising result and the advantages described above indicate the proposed approach has a strong application potential in precision manufacturing.
Contact:
SHE Jiangbo
Xi'an Institute of Optics and Precision Mechanics
E-mail: shejb@opt.ac.cn
Date of Publication: 25 January 2021