With the development of intelligent transportation, an effective vehicle management method is applied to track moving vehicles with the help of monitoring equipment. Video surveillance is the main way to obtain vehicle dynamic information.
Thus, the accurate and robust vehicle tracking algorithm is urgently needed when the tracking target suffering from heavy occlusions, illumination change and scale variation.
At present, the main problems of moving vehicle tracking for video surveillance are as follows: (1) Changes of illumination and scale make it difficult to extract moving objects effectively. (2) It is difficult to construct robust vehicle features to achieve effective tracking of the target under occlusion.
A research team led by Prof. Dr. QIU Shi from Key Laboratory of Spectral Imaging Technology, Xi'an Institute of Optics and Precision Mechanics (XIOPM) of the Chinese Academy of Sciences (CAS) proposed the modified GMM algorithm to reduce the error judgment probability of pixel state and extract the moving target accurately. The novel DAE neural network can also obtain sparse constraint in the hidden layer to limit vehicle feature model and achieve vehicle tracking accurately. The results were published in the Journal of Ambient Intelligence and Humanized Computing.
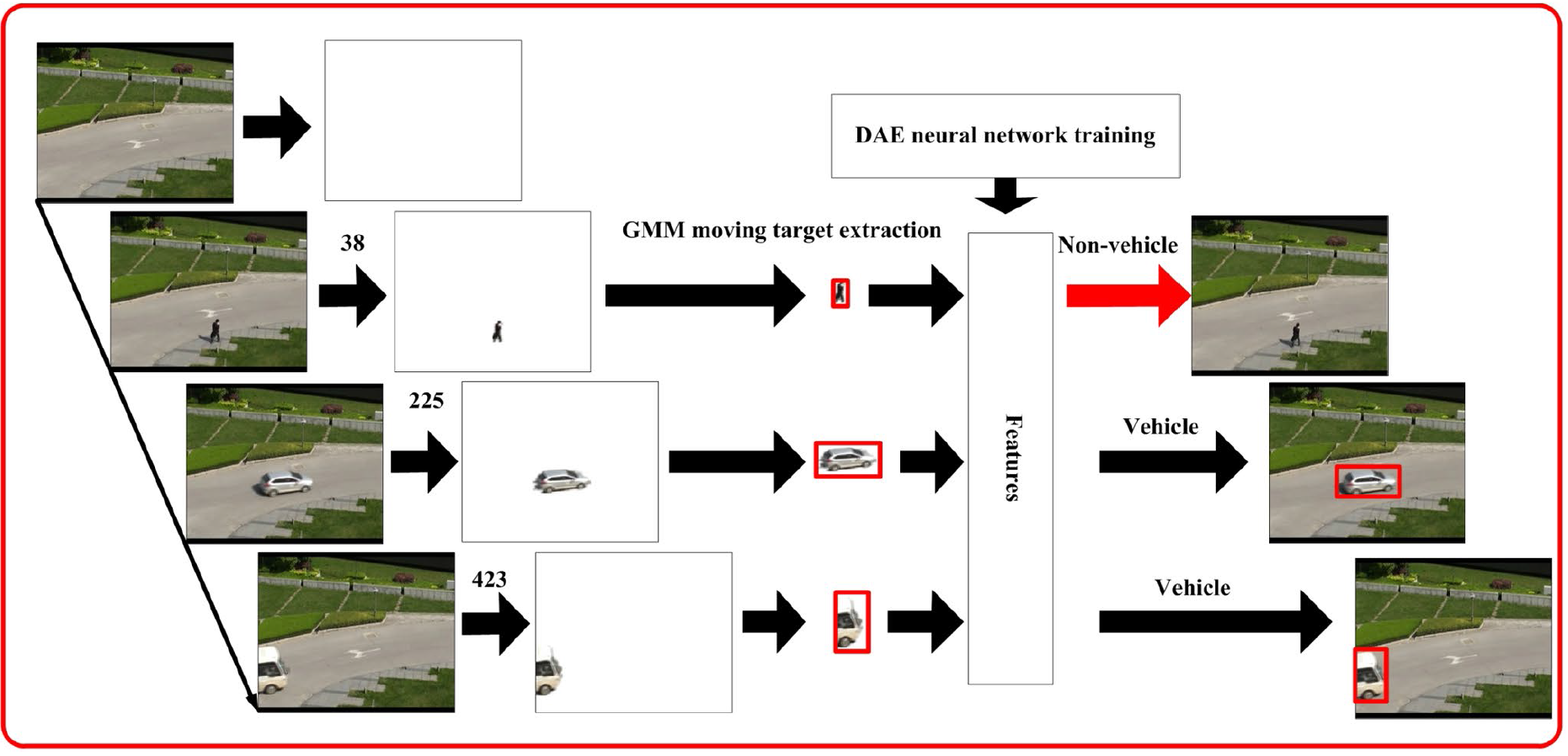 The flow chart of the proposed networks framework and algorithm (Image by XIOPM)
The flow chart of the proposed networks framework and algorithm (Image by XIOPM)
After utilizing the DAE neural network and GMM moving target extraction, the tracker can be more robust to complex scenarios, including heavy occlusion, illumination change and also multiple targets. From the perspective of probability theory, our algorithm can reduce the probability of the error judgment of pixel state and extract the moving object better.
The paper provided a novel idea in dealing with moving target in traffic applications. The Intelligent vehicle will drive on the road all by itself in the near future. Our method can be one part of the whole technique which may someday accomplish the autonomous driving.