Chang’e-3 probe successfully landed on the moon at 21:11 Dec. 14, making China the third country in the world to independently carry out the soft-landing mission. In the night on Dec. 15, Chang’e-3 lander and probe took photos of each other, a move that marked the complete success of the Chang’e-3 lunar probe mission.

Chang’e-3 lander photographed by panorama camera on Yutu moon rover
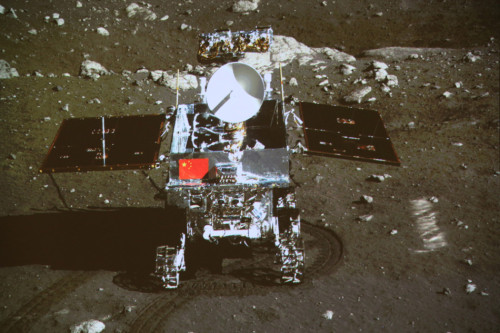
Yutu moon rover photographed by lander
Lander and moon rover took photos for each other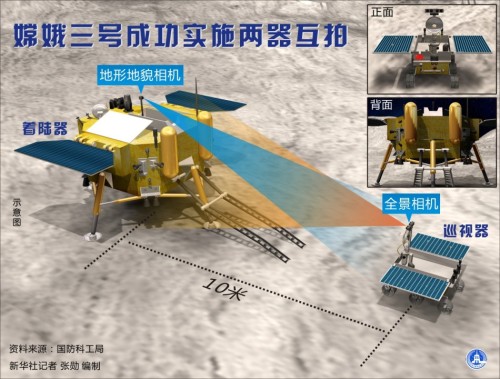
Having made key contributions in the Chang’e-1 and Chang’e-2 missions and taking the world’s clearest selenograph, XIOPM, CAS had developed two payloads and multiple parts for Chang’e-3 mission and undertook two scientific missions and two project tasks in the process of lunar probe project.
The panoramic camera: XIOPM has developed the panoramic camera which was a payload of the moon rover and undertook two project tasks and one scientific task. The two project tasks were separately cross-filming of lander and moon rover and surface survey by moon rover; the scientific task was obtaining 3D optical images of surveying areas for analysis and integrated research of the area’s geomorphology, impact craters and geological structure.
The UV lunar-based optical telescope (cooperating with NAOC): It is a payload of lander with the scientific task of carrying out lunar-based optical astro-observation.
The navigation of moon rover and optical system of obstacle-avoiding camera: It instructs the moon rover’s safety travel during its survey process.
The optical system of star sensor: It assists satellite and lander in attitude determination measurement.
The rocket-borne camera devices: They did real-time monitoring of carrier rocket launching and its flight and realized a live-broadcast for the first time of the launch of Chang’e mission.
Thanks to the above payloads and devices developed by XIOPM, millions of Chinese people witnessed many historic moments like the process of launch of Chang’e-3, the splendors on the moon surface and looking stars from the moon.
Panoramic Camera
-Witnessing the Great Moment of the Successful Landing on the Moon
After landing on the moon, the rover traveled a distance from the lander and took photos of lander by the panoramic camera, witnessing the completion of Chang’e-3 mission. Beside the major task, the panoramic camera surveyed the surroundings when rolling on the moon surface.
The scientific task of panoramic camera is mainly to obtain the 3D optical images of the rover’s rolling on the surface. The images will be used for analysis and integrated research of the geomorphology, impact craters and geological structure of the surveying area.
The panoramic camera is a set of binocular vision system and used for getting HD images and distance data. It has multiple functions like panoramic imaging and aided navigation. Comprising of two stand-alone devices with the same function, performance and interface, the panoramic camera is installed on the moon rover’s mast. Applying principle of binocular stereo vision, the two cameras, just like two eyes of a person, get two 2D images of the target area to constitute one stereopair and get depth and distance data through calculation. With 360° rotation and ±90° tilt of moon rover’s mast, it gets multiple images around and obtains panoramic image of the surveying area by image mosaic. It can get color photos of lander by adopting the principle of color coding imaging.
The technical features of panoramic camera include:
1. strong environmental adaptability: the panoramic camera adopts independent temperature control measurement to protect it from being effected by dramatic temperature difference. It can survive under the temperature of -50°C~75°C and work under the condition of -20°C~50°C.
2. light weight: it adopts optimized design of optical system, improving integration level and other lightweight technical measures. Under the condition of ensuring reliability and imaging quality during the entire life-cycle, a single camera is only a small percentage of the weight of Chang’e-1 Camera.
3. broad imaging range and high resolution: the camera is designed by applying large F-number and can get clear images of distance from 3m to infinity which almost covers the range from the foot of the moon rover to the boundary of the moon. When observing from a close distance, the spatial resolution can reach an accuracy of millimeter (equivalent to the rice size.) It’s the first time for China to get the high-resolution imaging of the moon surface.
4. color imaging: based on the principle of color coding imaging, it could get color image of lander and other targets and explore the distribution of non-ferrous minerals on the moon surface. It is the first time to apply the technology to the lunar exploration of our nation.
5. two modes of exposure: its automatic exposure and manual exposure could both automatically adjust scene brightness and get images of special targets in small range.
6. time-sharing work: when lander separates with rover on the moon surface, the camera, at a appropriate time, starts to work to get 360° panoramic images of the touchdown zone. It shuts down when the rover travels on the surface. Once arriving at the research site, the camera will duly start to work.

panoramic camera
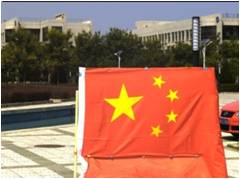
testing of the panoramic camera’s shooting effect
Lunar-Based Optical Telescope-Firstly Realizing the Astro-Observation Outside the Earth
Lunar-based optical telescope is developed jointly by NAOC and XIOPM, CAS. With it, people can observe stars from the moon when standing on the earth. The observation has two advantages: on one hand, the rotation of the moon is slower than that of the earth; on the other hand, there’s no atmospheric interference on the moon surface. It works in near-UV band, within which the deep space observation can not be conducted on the earth.
Lunar-based optical telescope comprises of telescope’s main body and reflector 2-D turntable. The turntable carrying the reflector conducts 2-D rotation to image the designated space target in the telescope’s main body. It could do long-continued observation to the same target and observe different space fields through scanning the deep space.
In order to realize the high-precision location and rotation of 2-D turntable, researchers boldly and confidently adopted purely mechanical way to make the accuracy to 3 seconds, which solved many key techniques, such as zero calibration, self-hold of turntable launch, adaptability of high-low temperature. On the condition of satisfying quality and volume restriction, the resetting accuracy reaches 1″.
Lunar-based optical telescope has following function features:
1. it is the first time that people conduct the astro-observation outside the earth;
2. it works in UV band and can obtain observation results which can never be acquired on the earth;
3. it has strong ability of anti-interference of stray light;
4. it has strong ability to adapt to the moon surface environment and can work under the temperature of -20℃ ~ 40℃;
5. its high automation can control any attitude of the telescope rack by autonomous calibration;
6. its light weight realizes ultra-lightweight by selecting light-weighted composite materials and optimized structures under the condition of satisfying optical indexes.

Lunar-based optical telescope 
main body of lunar-based optical telescope 
reflector turntable of lunar-based optical telescope
Rocket-Borne Camera Device-Giving a Live-Broadcast of Launching of Chang’e
In Chang’e-3 mission, the rocket-borne camera device was firstly used to carry out real-time monitoring of launch of carrier rocket and its flight. With rocket-borne camera device, people will be able to realize close-observation of the flight of rocket and cluster satellites. Together with 3 camera devices developed by XIOPM, Long March-3B carrier rocket shot rocket assisted separation, stage separation, fairing separation, satellite-rocket separation and the working condition of the equipment in the cabin. The lighting device provided target illuminating for the camera devices. The model of the camera device had successfully finished multiple launches and flight missions of Long March-3B carrier rocket and obtained precious image data.
Rocket-borne camera device
Navigation and Obstacle-Avoiding Camera’s Optical System
-Sharp Eyes for Safety Travel of the Moon Rover
Navigation camera, supporting the rover, is installed on the cradle head of rover mast. It comprises of left and right cameras and is the navigation device of the moon rover, mainly getting and sensing the surrounding surface data. It takes the responsibility to correct and control the path deviation of the rover. (As its key eye, optical system has technical features like large visual field, relatively low distortion and excellent image quality).
Likewise, obstacle-avoiding camera comprises of left and right cameras which jointly fixed in the bottom of the rover’s enclosure. It can identify the occurring obstacles in the travelling and help the rover keep away from them. (The optical system of obstacle-avoiding camera is a fisheye optical lens of ultra-low distortion. It has features like proximal half-sphere vision field, f-θ low distortion, even relative illumination, excellent image quality of overall vision field and light weight and smart size).

optical system of obstacle-avoiding camera

optical system of navigation camera
Optical System of Star Sensor
-Helping Satellites and Lander Locate” Where Am I”
Chang’e-3’s lander is equipped with 3 star sensors. They begins to work once satellites wholly enter the orbit. With the fixed star as reference, the star sensors conduct analysis and calculation by detecting the fixed stars at different locations to provide accurate spatial orientation and datum for satellites and the lander. It can timely tell “where am I?” (The optical system is called the eyeball of star sensor and has features like broad vision field, large caliber, high precision and high reliability).

optical system of star sensor